Rack And Pinion Linear Motion Calculation

Diagram Of Rack And Pinion More In Http Mechanical Engg Com Rack Adjustable Table Linear Actuator

Application Of Rack Pinion Mechanism 3 Youtube In 2020 Mechanical Projects Mechanical Design Mechanical Gears
Calculating Rack And Pinion How Do You Do That

Designing Seventh Axis Linear Motion Tracks For Robotic Positioning Diy Cnc Cnc Parts Arduino Cnc

How It S Made A Wooden Reciprocating Rack And Pinion Make Diy Rack Wooden Mechanical Design
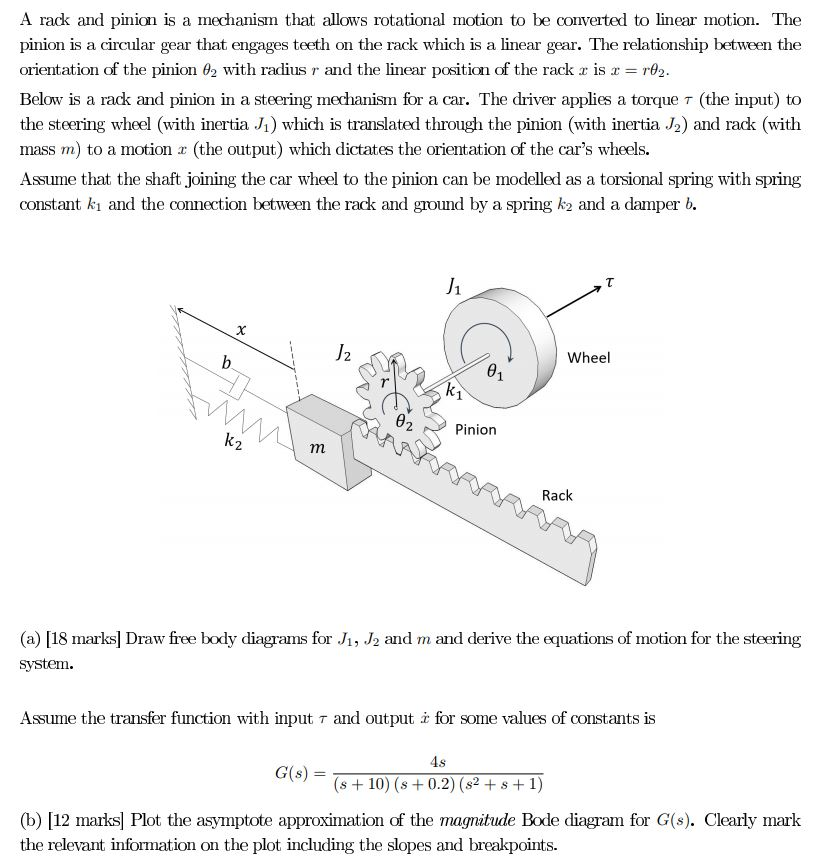
A Rack And Pinion Is A Mechanism That Allows Rotat Chegg Com

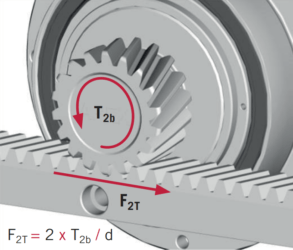
With rack and pinion steering the rotation of the pinion causes linear motion of the rack which turns the vehicle s wheels left or right.
Rack and pinion linear motion calculation. This pinion engages a linear gear the rack to convert rotational motion into translational motion. A bar shaped gear with an infinite flat surface radius of a cylindrical gear is called a rack and a meshed spur gear is called a pinion. From linear deviation to hardness and straightness all tolerances can be found. Maximum rotational speed of pinion.
For a silent and low backlash drive with a long service life it is recommended to use a pinion and rack from 1 supplier. The rack s teeth are trapezoidal while the pinion has an involute tooth profile. Many gearing applications require converting rotary motion into linear motion. The most common form of this is the use of a pinion attached to a motor that then rests on a gear rack and travels back and forth depending on the direction of the motor shaft rotation.
The following online calculator computes the basic dimensions and tooth profiles of a meshing rack and pinion based on the pinion s module number of teeth pressure angle usually 20 and profile shift. The tolerances especially with helical teeth are very important. Gear rack and pinion creation of linear motion. To determine the maximum rotational speed of the pinion simply divide the maximum linear speed of the application by the pinion circumference π diameter convert from millimeters to meters and convert from seconds linear speed m s or ft s to minutes rotational speed rpm.
Rack and pinion systems are a common component in railways. Another advantage for using circular pitch instead of module in these. Calculate rack and pinion. A circular gear called the pinion engages teeth on a linear gear bar called the rack.
When considering a rack and pinion for linear motion translation circular pitch is one way that you can obtain a fixed travel distance without having to use complex calculations to determine the number of rotations needed on the pinion to travel a certain distance. For some applications the motor is fixed and the rack is the object that is moving. Rotational motion applied to the pinion causes the rack to move relative to the pinion thereby translating the rotational.

What Are Rack And Pinion Sets Technical Summary In 2020 Gear Sets Gears Pinion Gear
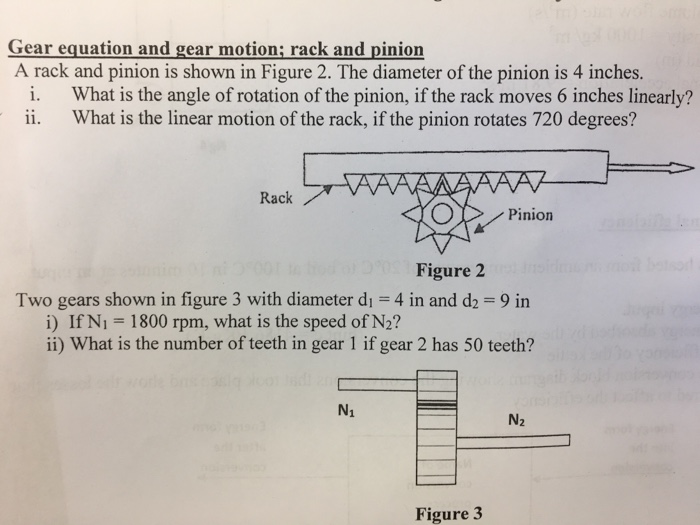
Solved Gear Equation And Gear Motion Rack And Pinion A R Chegg Com

Atlanta Ztrs Highforce Rack Pinion Drive Systems Overview Youtube Diy Cnc Woodworking Garage Diy Lathe

Fusion 360 Rack And Pinion Gear Youtube Pinion Gear Gears Fusion
Solved Rack And Pinion Mechanism Is Used To Convert Rotar Chegg Com

Double Rack Gear Light Switch Cover Plate With Images Light Switch Plate Cover Light Switch Covers Switch Covers

Rack Pinion Mechanism 5 Mechanical Gears Engineering Materials Engineering
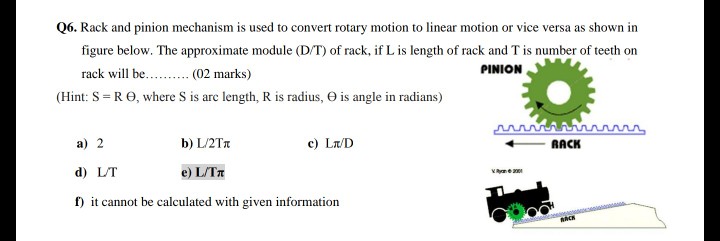
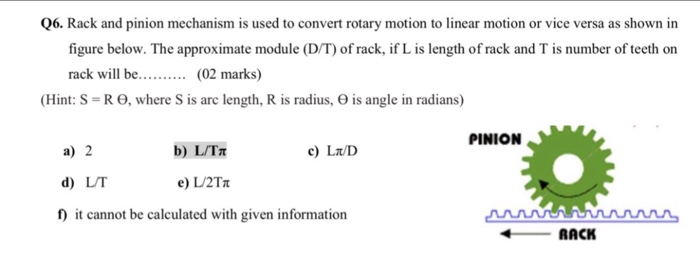
Solved Q6 Rack And Pinion Mechanism Is Used To Convert R Chegg Com

Cp Racks Pinions Technical Information

Scott Russell Linkage Turn Linear Motion Through 90 Degrees By Mgg942 Thingiverse Woodworking Jigs Linear Motion
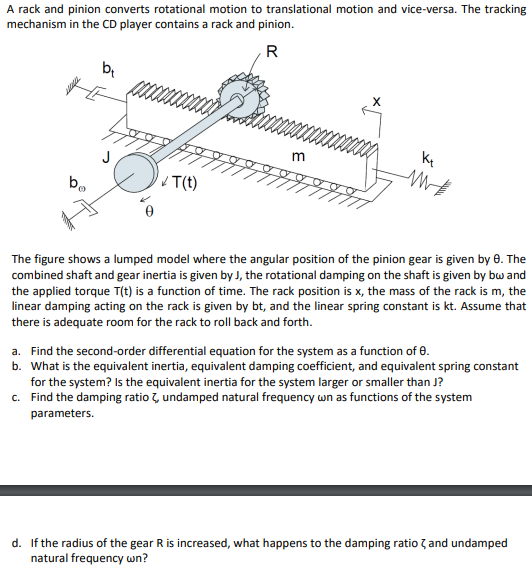
Solved A Rack And Pinion Converts Rotational Motion To Tr Chegg Com

Gear Rack Mechanism For Reversing Rotation 2 Youtube Mechanical Design Gears Mechanical Engineering

Rack And Pinion Sizing Machine Designing

Pin On Machine Designing

Image Result For Worm Gear Calculation

Factory Automation Rack And Pinion Gantry Robot Track Motion System Stepper Motor Motion Machine Tools

Application Of Rack Pinion Mechanism 2 Youtube Metal Working Tools Mechanical Design Mechanical Gears

Rx 7 Rack And Pinion Steering Kit Rack Kit Rx7
Https Encrypted Tbn0 Gstatic Com Images Q Tbn 3aand9gcqhkdntq68 Rjik939bxwfvbu9 Xlj8gov0w4sddbrsmd6jkwth Usqp Cau

Worm Gear Definition Working Applications Gears Mechanical Design Worm Drive

A Blog On Insurance Especially Marine Insurance Sports More Of Cricket And Current Affairs Involving Syma Triplicane Tamil N Gears Mechanical Projects Cogs

The Portal Gantry Type Fp 3 Axis Linear Modules C Gudel Group Ag In 2020 Design Macro Photography Home Decor

Linear Guides And Bearings Linear Motion Linear Line Rollon Group Linear Line Linear Actuator Linear
Atlanta Gear Racks Diy Cnc Cnc Plans Mechanical Projects

Motion Delay Mechanism 1 Youtube Wood Mechanics Gears Motion

Rollon Linear Guides And Linear Motion Systems Linear System Locker Storage

Linear Motors Linear Technology Spiritual Blog

Gear Rack Drive For Increasing Stroke Length 3a Gears Lego Gears Mechanical Design

Teeth Uncompleted Gear Rack Drive For Delay Motion Youtube Ingenieria Mecanica Detalles Constructivos Proyectos

Roller Pinions Another Way To Roll Down The Line Ahsap Isciligi Cnc Araba

Converting Rotation To Rotary And Linear Reciprocating Motion 3 Rotating Motion Linear

8 X 4 2015 Hd Rack And Pinion Desktop Cnc Router Package Desktop Cnc Router Cnc Wood Router Cnc Router

Pin On Rack Com Painel Pequeno Casas Bahia

Pinion Rack B 1 00 A 1 Interconnected Systems Thi Chegg Com
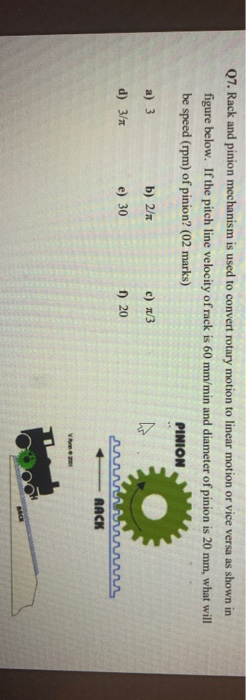
Solved Q7 Rack And Pinion Mechanism Is Used To Convert R Chegg Com

Linear Motion Bearing Ball Screw Aluminium Industry Rack And Pinion Transparent Png

Drive System Solutions For Rack And Pinion Applications

Go Long The Pros And Cons Of Rack And Pinion Systems Machine Design

Cnc Z Axis Slide 3 Axis Engraving Machine Diy Milling Linear Motion Mini 60mm Ebay Diy Cnc Cnc Engraving Machine Cnc Lathe

Pin On Crib Mattress Simmons

Gear Rack And Pinion Khk Gears

Pin On Dining Room Decor Coastal Table Setting

